
An improved A star algorithm for wheeled robots path planning with jump points search and pruning method

Abstract
Wheeled robots enjoy popularity in extensive areas such as food delivery and room disinfection. They can lower labor costs, protect human health from infection, and so on. Given the need to avoid obstacles, the path planning of robots is an elementary module. The A* algorithm has been widely used thus far, but it suffers much memory overhead and provides a suboptimal path. Therefore, we propose an improved A* algorithm with the jump point search method and pruning idea. Specifically, the jump point search method reduces the occupancy rate of the open list. The shorter length of the path can be achieved by pruning. Simulation experiments proved that the improvement was effective and practical.
Keywords
1. INTRODUCTION
In recent years, wheeled robots have gained more and more popularity and have been applied to extensive scenarios [1-3]. They can deliver food [4, 5], provide security guards [6, 7], and offer services [8, 9] for people. Path planning for wheeled robots [10-12] is one of the hottest and most difficult spots in robot research. The existing path planning methods are mainly divided into three categories: graph-based, sampling-based, and intelligent methods. Traditional graph-based search methods include A* [13, 14], LPA* [15, 16], ARA* [17, 18], etc. Sampling-based search methods include RRT [11, 19], RRT* [20, 21], RRT-Connect [22, 23], etc. Intelligent methods include particle swarm algorithm [24], genetic algorithm [25], ant colony algorithm [26], etc. The A* algorithm is a global path planning method based on known environmental information, with a real-time and better suboptimal solution, thus it has been widely employed.
However, the classical algorithm has the disadvantages of much memory overhead and providing a suboptimal solution. Therefore, some researchers have proposed to improve the A* algorithm. For the purpose of stability and effectiveness, Wang et al.[27] presented the improved method from the view of expansion distance, bidirectional search, heuristic function optimization, and smoothing. Song et al.[28] considered the cost function with an additional parameter, with the result of fewer nodes and lower memory overhead. Specifically, the parameter is a cost from the previous point to the final one. Zhang et al.[29] achieved a high success rate and short length through applying an early-stop method, in which the local path is used directly if it is safe and collision-free. In addition, they also introduced a post-processing stage to shorten the resulting path by straightening the local path.
Under the environmental model, grid map, this paper proposes an effective method of global path planning for wheeled robots. First, we analyze the shortcomings of the A* algorithm and find a corresponding measurement. To solve the problem of excessively high node occupancy rate of open list, a jump point search method is adopted [30, 31]. Only the nodes with special properties are added to the open list during the process of node expansion. Considering the suboptimal solution of the path, a pruning method is proposed based on the axiom that the shortest path between two points is a straight line [32]. The polyline with an inflection point is replaced by a straight line. Lastly, a C++ simulation was designed and performed to verify that the improved A* algorithm can improve the traditional one.
The rest of this paper is structured as follows. In Section 2, we review the traditional A* algorithm for path planning. In Section 3, we propose the idea of combining jump search and pruning to improve the A* algorithm. Experimental results are shown in Section 4. Finally, this paper is summarized in Section 5.
2. TRADITIONAL A* ALGORITHM
2.1. Grid map
In this paper, the map used in path planning is the grid map [33], which is a common map representation. The basic idea is to decompose the environment into local units, i.e., grid, and assign the state of occupancy to each grid. If there is an obstacle located in the grid, then it is a non-free grid, which is inaccessible to the robot. Otherwise, it is reachable, called a free grid. To simplify the path planning process of wheeled robots, we set up the following assumptions:
Assumption 1: In the process of planning a feasible path, the size and position of the obstacles remain static.
Assumptions 2: In the process of planning a feasible path, the obstacle can occupy the grid completely.
In this work, we use the evenly spaced grids and assume 1 denotes the non-free grid and 0 denotes the free grid, as shown in Figure 1.
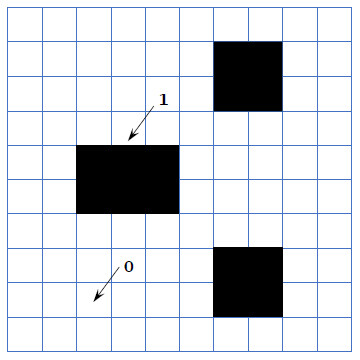
Figure 1. Occupancy state of the grid map.
2.2. A* algorithm
Based on the known grid, the A* algorithm mainly plans the path and applies an evaluation function to determine its expansion direction. The function represents the distance between the initial node and target node by the expansion one. The equation of the evaluation function is defined as follows:
where
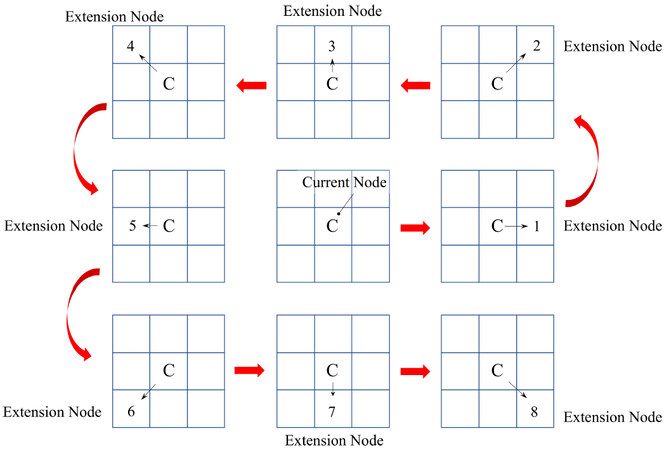
Figure 2. Node expansion in equal probability.
Then, a node expansion or searching process based on the minimum value continues. First, the values of each node of the surrounding eight neighbor points are estimated. Second, the node with free grid with the lowest estimated value is selected, which is set as the starting node in the next expansion process. Third, the chosen node is added to the open list and the node with the minimum value in the open list is chosen for the closed list. The expansion terminates when the target node is visited. During the process above, the distance between two nodes is obtained by the Manhattan distance:
where
If
Besides, we note that two node containers, named open list and closed list, respectively, are built. The generated nodes in the expansion are stored in the open list and the nodes with minimum value in the open list are stored in the closed list. After the planning process, a suboptimal path is generated. The flow chart of A* is shown in Figure 3.
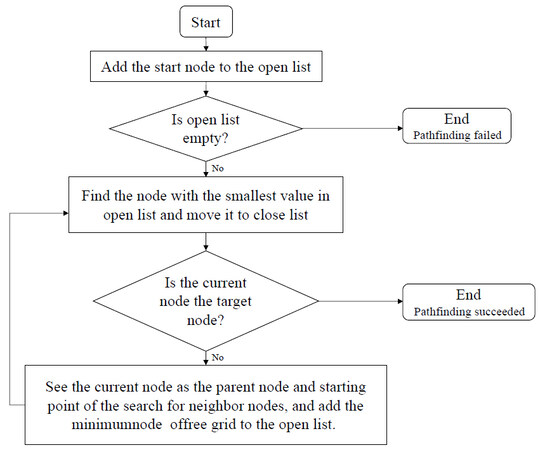
Figure 3. Flow chart of traditional A* algorithm.
The specific steps of the A* algorithm are as follows.
Step 1: Initialize the grid map and define the search method of nodes to expand neighbor nodes in sequence with equal probability.
Step 2: Add the initial node to the open list.
Step 3: Determine whether the open list is empty. If it is true, the pathfinding fails. Otherwise, continue to Step 4.
Step 4: Find the node with the smallest value in the open list and move it to the closed list.
Step 5: Determine whether the current node is the target node. If it is true, the pathfinding is successful. Otherwise, continue to Step 6.
Step 6: Consider the current node as the parent node and starting point of the search for neighbor nodes and add the minimum node of the free grid to the open list. Continue to Step 4.
In the next section, we discuss how to improve the A* algorithm.
3. IMPROVED A* ALGORITHM
Given the high node occupancy rate and suboptimal solution, the jump points search and pruning methods are used to improve the A* algorithm.
3.1. Selective strategy
In this section, a selective node search strategy is developed. Only the node with specific properties can be chosen. An example of selective strategy is shown in Figure 4. Specifically, there is a neighbor node of the node
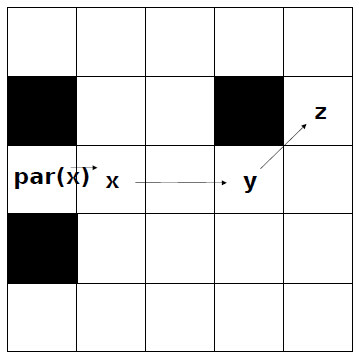
Figure 4. Selective strategy.
where
3.2. Rules for improvement
In this section, we introduce some rules to reduce the number of nodes in the open list.
3.2.1. Rules of node expansion
The expansion direction is shown in Figure 5. For example, the direction from
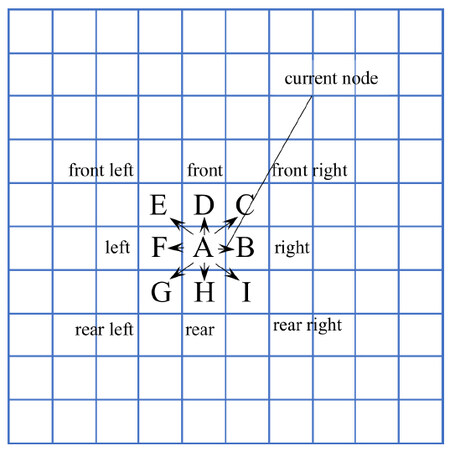
Figure 5. Node expansion of improved A* algorithm.
3.2.2. Rules of forced neighbor
Assume
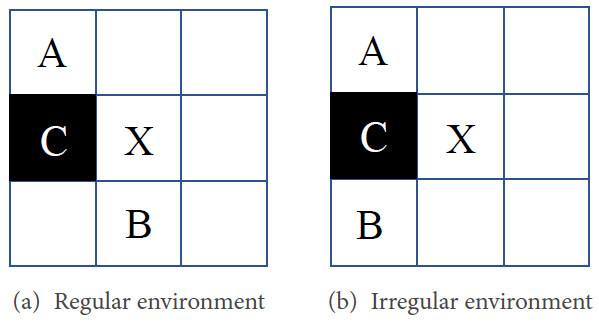
Figure 6. Force neighbors under two conditions.
3.2.3. Rules of jump points
The nodes selectively chosen to expand are termed jump points. The rules are as follows. First, a node is regarded as a jump point when the node is surrounded by the forced neighbor in the diagonal direction. Second, if a node has a parent node in the diagonal direction and a reachable path in the straight direction to a jump point, then it is a jump point. Third, the starting node and the target node are stipulated as jump points. An example of finding a jump point during node expansion is shown in Figure 7.
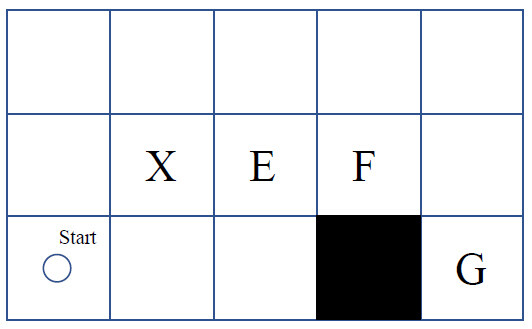
Figure 7. Example of jump points.
It is obvious that
3.2.4. Rules of nodes
First, we demonstrate a rule of the search order. The jump points are primarily searched in the straight-line direction and then in the diagonal direction. Second, the open list only adds the jump points. The search nodes with the lowest cost are added to the closed list. The planning path is formed by the subsets of these jump points.
3.2.5. Rules of path
Inspired by the theorem that any side of a triangle must be shorter than the other two sides added together, a pruning method can be applied. In Figure 8, there are three consecutive nodes, i.e.,
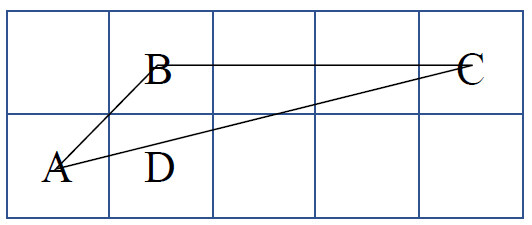
Figure 8. Rules of path.
3.3. Improved algorithm
Based on the strategy above, the improved A* algorithm is shown in Algorithm 1. The algorithm takes the grid map and initial node as inputs and outputs a feasible global path. First, the grid map is initialized and the search method of nodes is defined to expand neighbor nodes in sequence with equal probability. Then, the initial node is added to the open list (Line
Algorithm 1 Improved A* algorithm. 1: input: grid_map, initial_node 2: output: global_path 3: openlist.push_back(initial_node) 4: while True do 5: if openlist.isEmpty() then return NULL 6: else 7: node 8: openlist.erase(node) 9: closelist.push_back(node) 10: end if 11: if isTarget(node) then return GetGlobalPath(node) 12: else 13: jump_point 14: openlist.push_back(jump_point) 15: end if 16: end while
In summary, the differences between the traditional A* and improved A* depend on the rules of constraint. The constraint successfully provides traditional A* various ways of node expansion and reduces the time of planning in the pathfinding process. Besides, the occupancy rate drops due to the decreasing nodes in the open list. In the end, the path length is trimmed because the polyline is replaced by the straight line at the inflection point of the path.
4. EXPERIMENT
To prove the effectiveness of the improved A* algorithm, simulation experiments in C++ were carried out. At first, four grid maps with obstacles were constructed, and a simulation of the traditional A* algorithm was designed and performed. In detail, 1% of grid points were randomly regarded as the center points of the obstacle and the size of the obstacle was
We noticed that many expansion nodes were stored in the open list, causing a high occupancy rate and consuming too many memory resources. Moreover, the feasible planning path was relatively optimal and the inflection point of the path could be pruned.
The grid map required for the experiment is shown in Figure 9, where the sizes of the grid maps are, respectively,
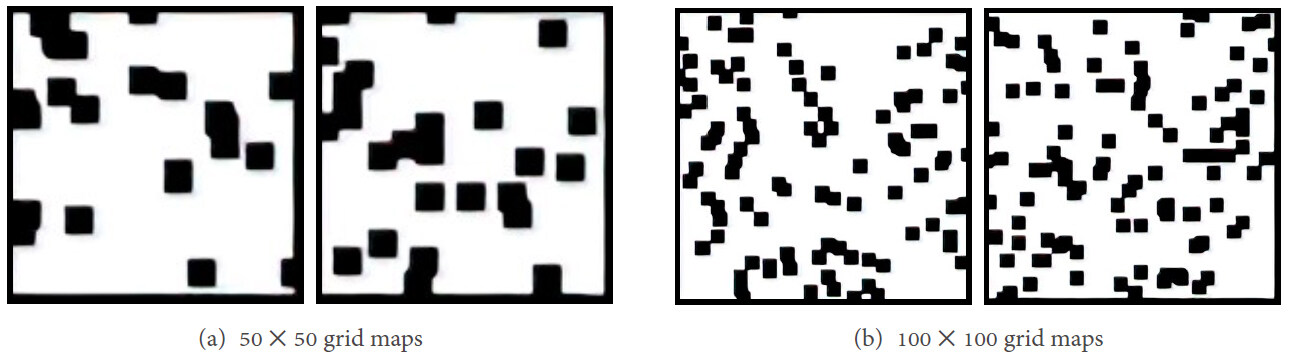
Figure 9. Randomly generated grid maps of different size.
The simulation on
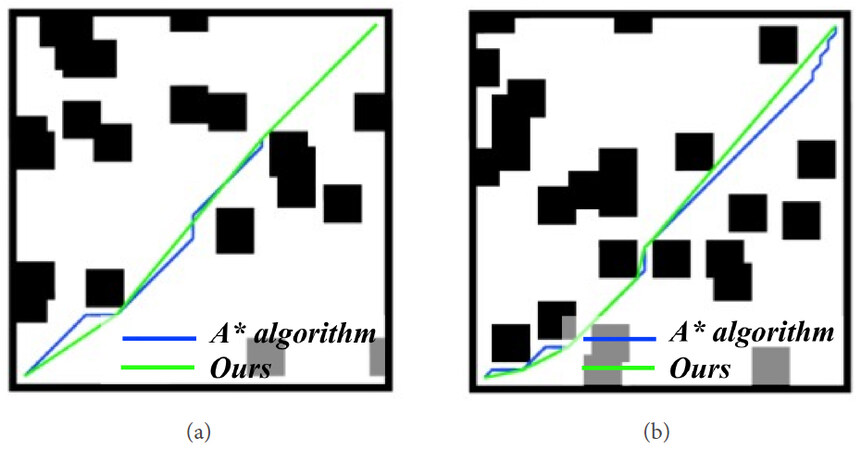
Figure 10. Path planning on
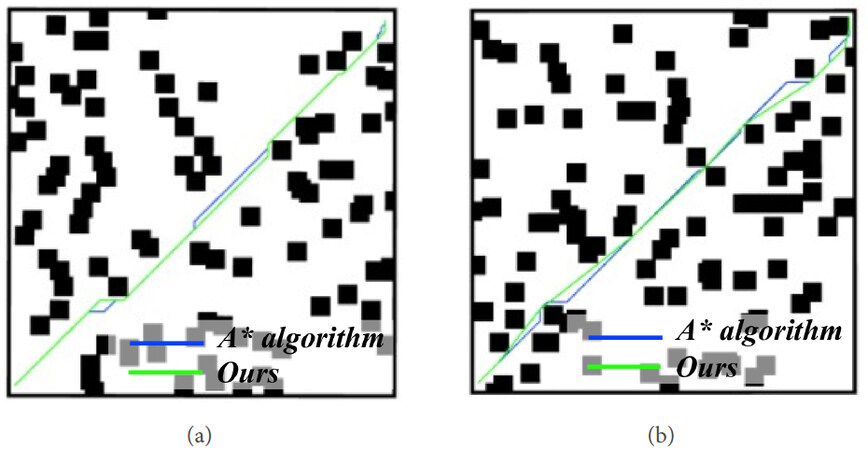
Figure 11. Path planning on
The experimental data are shown in Tables 1 and 2. The occupancy rate is the ratio of the number of open-list nodes to the number of nodes on the grid map. In Table 1, based on the
Average Performance results on randomized
| A* | Improved A* | |
| Node numbers of open list | ||
| Occupancy rate of open list | ||
| Path length without pruning | - | |
| Path length with pruning | - |
Average performance results on randomized
| A* | Improved A* | |
| Node numbers of open list | ||
| Occupancy rate of open list | ||
| Path length without pruning | - | |
| Path length with pruning | - |
In Table 2, based on the
Comprehensive experimental results show that the improved A* algorithm can improve the node occupancy rate and shorten the path length. In other words, it provides the traditional A* method with the capabilities of higher efficiency and lower consumption of memory.
5. CONCLUSION
Although the solution of the traditional A* algorithm is relatively optimal, it can be further improved in two aspects. On the one hand, too much memory resource is consumed by the large number of nodes stored in the open list. On the other hand, at the inflection point of the planning path, there is a possibility to prune based on the free grid. Thus, this article proposes the following methods, as shown in Figure 12:
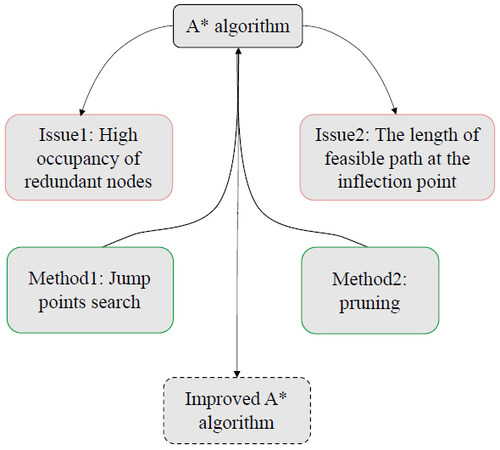
Figure 12. Conclusion.
1. Incorporate jump point search methods to selectively add specific properties of nodes to the open list and reduce the number of nodes.
2. Merge the pruning idea with the classical A* algorithm. A straight path is used to replace the polyline path, and the length of the path is shortened.
The simulation experiments verified the practical effect of our improved A* algorithm. In the future, we will study how to reduce the time of node traversal to improve the real-time performance of path planning.
DECLARATIONS
Authors' contributions
Writing-original draft and conceptualization: Huang H
Validation and supervision: Li Y
Investigation: Bai Q
Availability of data and materials
Not applicable.
Financial support and sponsorship
None.
Conflicts of interest
All authors declared that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2022.
REFERENCES
1. Lapierre L, Zapata R, Lepinay P. Combined path-following and obstacle avoidance control of a wheeled robot. Int J Rob Res 2007;26:361-75.
2. Diveev A, Konstantinov S. Study of the practical convergence of evolutionary algorithms for the optimal program control of a wheeled robot. J Comput Syst Sci Int 2018;57:561-80.
3. Kashyap AK, Pandey A. Different nature-inspired techniques applied for motion planning of wheeled robot: a critical review. Int J Adv Robot Autom 2018;3:1-10.
5. Bontikous S, Guérin A, Postaire M, et al. A drug storage delivery robot in a cold room: a new feature to consider. J Pharm Clin 2019;38:24-26.
6. Luo RC, Lin TY, Su KL. Multisensor based security robot system for intelligent building. Robotics and Autonomous Systems 2009;57:330-38.
7. Dong F, Fang S, Xu Y. Design and implementation of security robot for public safety. In: 2018 International Conference on Virtual Reality and Intelligent Systems (ICVRIS). IEEE; 2018. pp. 446-49.
8. Belanche D, Casaló LV, Flavián C, Schepers J. Service robot implementation: a theoretical framework and research agenda. The Service Industries Journal 2020;40:203-25.
9. Baraka K, Veloso MM. Mobile service robot state revealing through expressive lights: formalism, design, and evaluation. Int J of Soc Robotics 2018;10:65-92.
10. Patle B, Pandey A, Parhi D, et al. A review: on path planning strategies for navigation of mobile robot. Defence Technology 2019;15:582-606.
12. Ghosh S, Panigrahi PK, Parhi DR. Analysis of FPA and BA meta-heuristic controllers for optimal path planning of mobile robot in cluttered environment. IET Science, Measurement & Technology 2017;11:817-28.
13. Zhang L, Li Y. Mobile robot path planning algorithm based on improved A star. In: Journal of Physics: Conference Series. vol. 1848. IOP Publishing; 2021. p. 012013.
14. Kuswadi S, Santoso JW, Tamara MN, Nuh M. Application SLAM and path planning using A-star algorithm for mobile robot in indoor disaster area. In: 2018 International Electronics Symposium on Engineering Technology and Applications (IES-ETA). IEEE; 2018. pp. 270-74.
15. Likhachev M, Koenig S. A generalized framework for lifelong planning A* search. In: ICAPS; 2005. pp. 99-108.
16. Ogata K. A generic approach on how to formally specify and model check path finding algorithms: dijkstra, A* and LPA*. Int J Soft Eng Knowl Eng 2020;30:1481-523.
17. Likhachev M, Gordon GJ, Thrun S. ARA: formal analysis 2003. Available from: http://www.cs.cmu.edu/afs/cs/Web/People/maxim/files/ara_tr.pdf.
18. Likhachev M, Gordon GJ, Thrun S. ARA*: anytime A* with provable bounds on sub-optimality. Available from: https://www.ri.cmu.edu/publications/ara-anytime-a-with-provable-bounds-on-sub-optimality/.
19. Karaman S, Walter MR, Perez A, Frazzoli E, Teller S. Anytime motion planning using the RRT. In: 2011 IEEE International Conference on Robotics and Automation. IEEE; 2011. pp. 1478-83.
20. Agarwal S, Gaurav AK, Nirala MK, Sinha S. Potential and sampling based rrt star for real-time dynamic motion planning accounting for momentum in cost function. In: International Conference on Neural Information Processing. Springer; 2018. pp. 209-21.
21. Park JK, Chung TM. Boundary-RRT* algorithm for drone collision avoidance and interleaved path re-planning. J Infn Pro Syst 2020;16:1324-42.
22. Zhang D, Xu Y, Yao X. An Improved path planning algorithm for unmanned aerial vehicle based on rrt-connect. In: 2018 37th Chinese Control Conference (CCC). IEEE; 2018. pp. 4854-58.
23. Li S, Zhao D, Sun Y, Yang J, Wang S. Path planning algorithm based on the improved RRT-connect for home service robot arms. In: 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR). IEEE; 2021. pp. 403-7.
24. Song B, Wang Z, Zou L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Applied Soft Computing 2021;100:106960.
25. Lamini C, Benhlima S, Elbekri A. Genetic algorithm based approach for autonomous mobile robot path planning. Procedia Computer Science 2018;127:180-89.
26. Konatowski S, Pawlowski P. Application of the ACO algorithm for UAV path planning. Przeglad Elektrotechniczny 2019;95:115-18.
27. Wang H, Qi X, Lou S, et al. An efficient and robust improved A* algorithm for path planning. Symmetry 2021;13:2213.
28. Song Z, Yuan L. Application of improved A algorithm in mobile robot path planning. In: 2019 3rd International Symposium on Autonomous Systems (ISAS); 2019. pp. 534-37.
29. Zhang H, Wang Y, Zheng J, Yu J. Path planning of industrial robot based on improved RRT algorithm in complex environments. IEEE Access 2018;6:53296-306.
30. Harabor D, Grastien A. Improving jump point search. In: Proceedings of the International Conference on Automated Planning and Scheduling. vol. 24; 2014. pp. 128-35. Available from: https://www.semanticscholar.org/paper/Improving-Jump-Point-Search-HaraborGrastien/f4b9b6355077685a033d38dd2392684a10fa4db6.
31. Zheng X, Tu X, Yang Q. Improved JPS algorithm using new jump point for path planning of mobile robot. In: 2019 IEEE International Conference on Mechatronics and Automation (ICMA). IEEE; 2019. pp. 2463-68.
32. Webb J. A straight line is the shortest distance between two points. The Mathematical Gazette 1974;58:137-38.
33. Wang KHC, Botea A. Tractable multi-agent path planning on grid Maps. In: IJCAI. vol. 9. Pasadena, California; 2009. pp. 1870-75. Available from: https://www.ijcai.org/Proceedings/09/Papers/310.pdf.
Cite This Article
Export citation file: BibTeX | RIS
OAE Style
Huang H, Li Y, Bai Q. An improved A star algorithm for wheeled robots path planning with jump points search and pruning method. Complex Eng Syst 2022;2:11. http://dx.doi.org/10.20517/ces.2022.12
AMA Style
Huang H, Li Y, Bai Q. An improved A star algorithm for wheeled robots path planning with jump points search and pruning method. Complex Engineering Systems. 2022; 2(3): 11. http://dx.doi.org/10.20517/ces.2022.12
Chicago/Turabian Style
Huang, Hongqian, Yanzhou Li, Qing Bai. 2022. "An improved A star algorithm for wheeled robots path planning with jump points search and pruning method" Complex Engineering Systems. 2, no.3: 11. http://dx.doi.org/10.20517/ces.2022.12
ACS Style
Huang, H.; Li Y.; Bai Q. An improved A star algorithm for wheeled robots path planning with jump points search and pruning method. Complex. Eng. Syst. 2022, 2, 11. http://dx.doi.org/10.20517/ces.2022.12
About This Article
Copyright

Data & Comments
Data


 Cite This Article 15 clicks
Cite This Article 15 clicks

 Like This Article 43
likes
Like This Article 43
likes







Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at support@oaepublish.com.